Publications & Projects

soarm-ws: A full-stack workspace for SO-ARM100 manipulator research
Abstract
An ongoing, modular workspace for the SO-ARM100 manipulator: a thin umbrella repo over independently-versioned packages for servo/IMU transport, teleoperation, camera calibration, imitation learning (LeRobot), and reinforcement learning (mjlab/MuJoCo). Each package ships as its own git submodule with its own GitHub remote, so hardware transport, teleop, dataset recording, and simulation/RL training can evolve independently. Includes a full hardware build guide (3D-printed SO-ARM100, FEETECH servos, IMU/camera sensing) alongside the software stack.
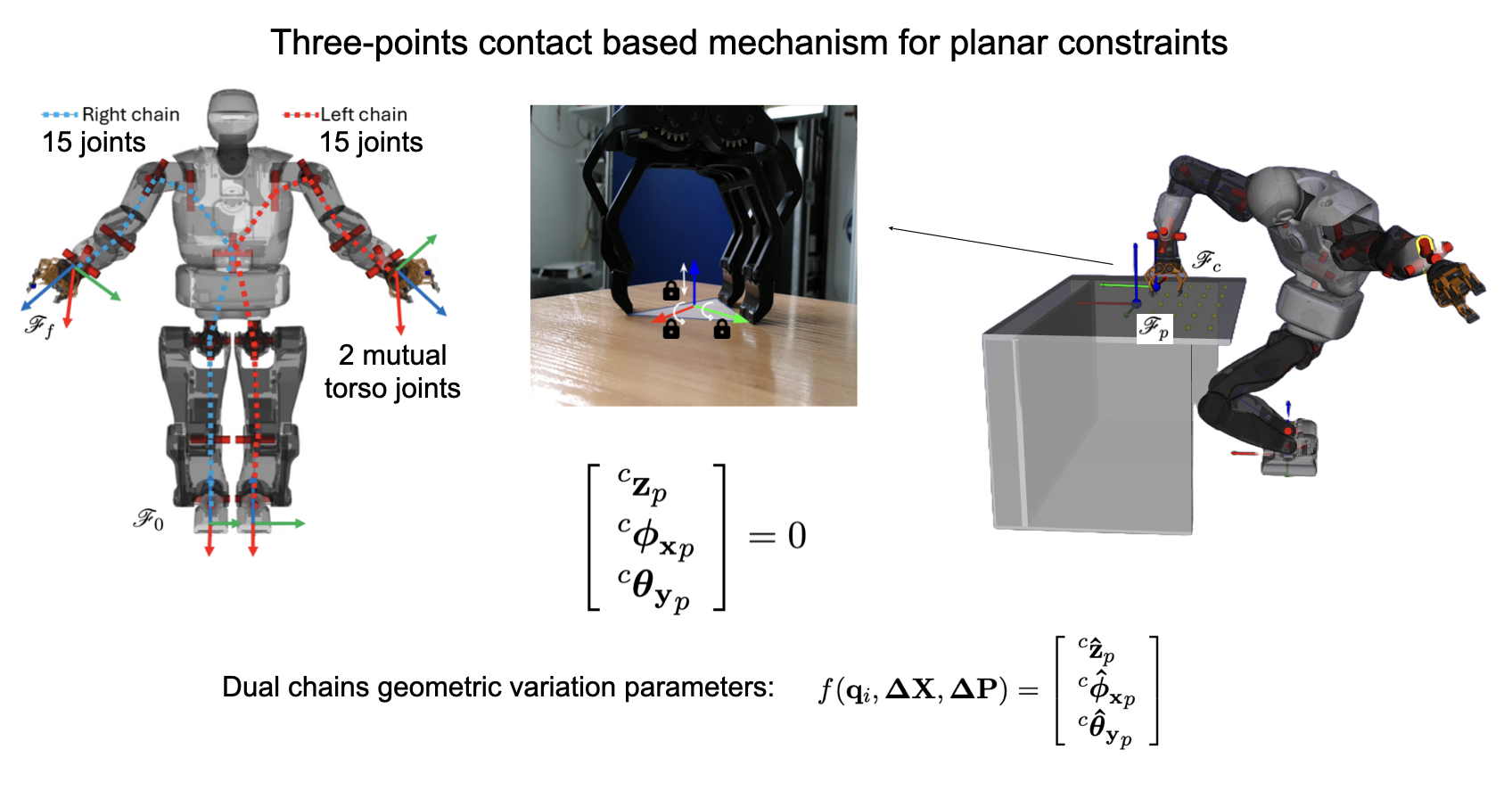
Humanoid Robot Whole-body Geometric Calibration with Embedded Sensors and a Single Plane
Abstract
This paper presents a novel method for whole-body geometric calibration of humanoid robots using a single plane, embedded sensors, and an admittance controller, introducing the IROC algorithm for optimal posture selection that achieved 2.3x accuracy improvement on the TALOS robot.
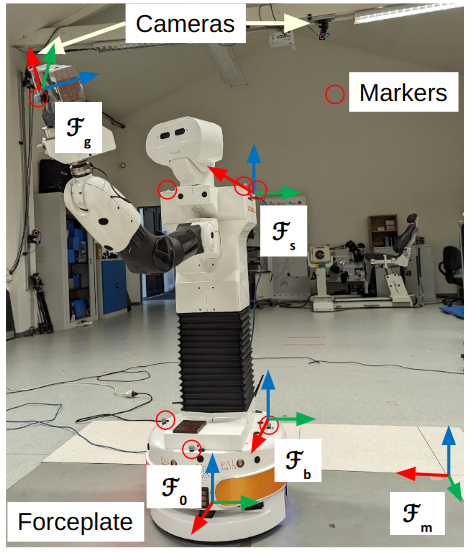
Improving Operational Accuracy of a Mobile Manipulator by Modeling Geometric and Non-Geometric Parameters
2024 IEEE-RAS 23rd International Conference on Humanoid Robots (Humanoids) - Nancy, France
Abstract
This paper improves mobile manipulator accuracy by modeling geometric and non-geometric parameters including base suspension and joint backlash, achieving 60% better end-effector pose estimation on the TIAGo robot.
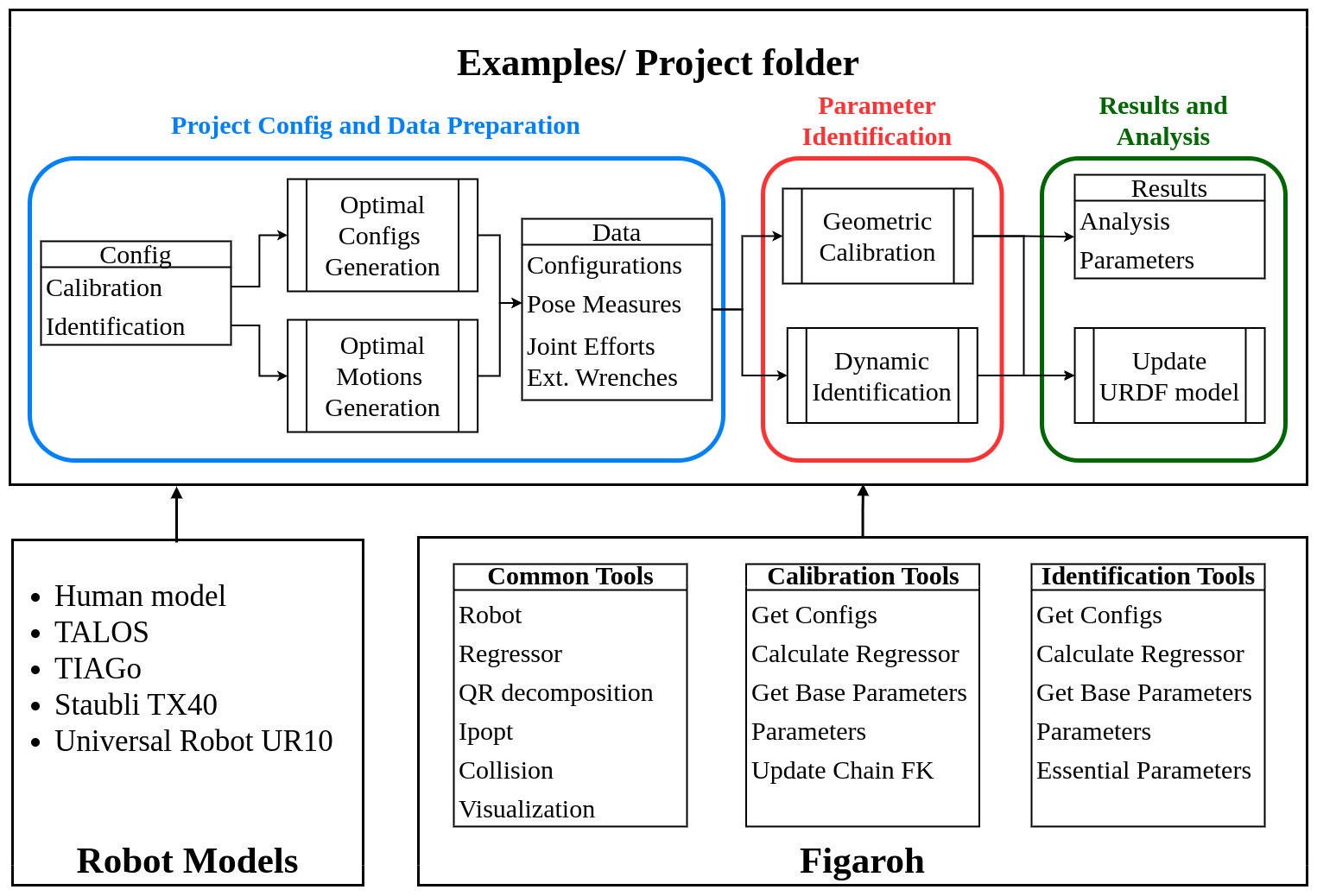
FIGAROH: a Python toolbox for dynamic identification and geometric calibration of robots and humans
2023 IEEE-RAS 22nd International Conference on Humanoid Robots (Humanoids) - Austin, Texas
Abstract
This paper introduces FIGAROH, a Python toolbox for geometric calibration and dynamic identification of robots and humans that automates model building, data processing, and optimal trajectory generation.
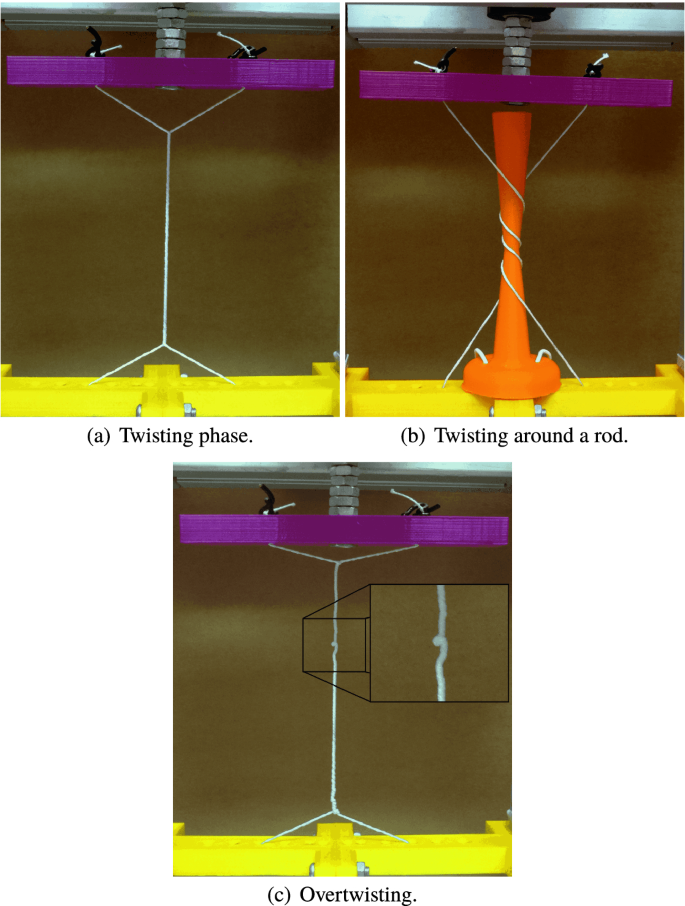
Non-cylindrical wrapping rods and compliant adapters for multi-mode twisting string actuation
International Journal of Mechanisms and Robotic Systems 5 (1-2), 93-110
Abstract
This paper improves twisting string actuation efficiency through non-cylindrical wrapping rods and compliant adapters, demonstrating enhanced mechanical advantage and speed for robotic applications.